
产品知识
2021.11.04
AGV核心控制器,AMR搬运机器人控制器介绍:
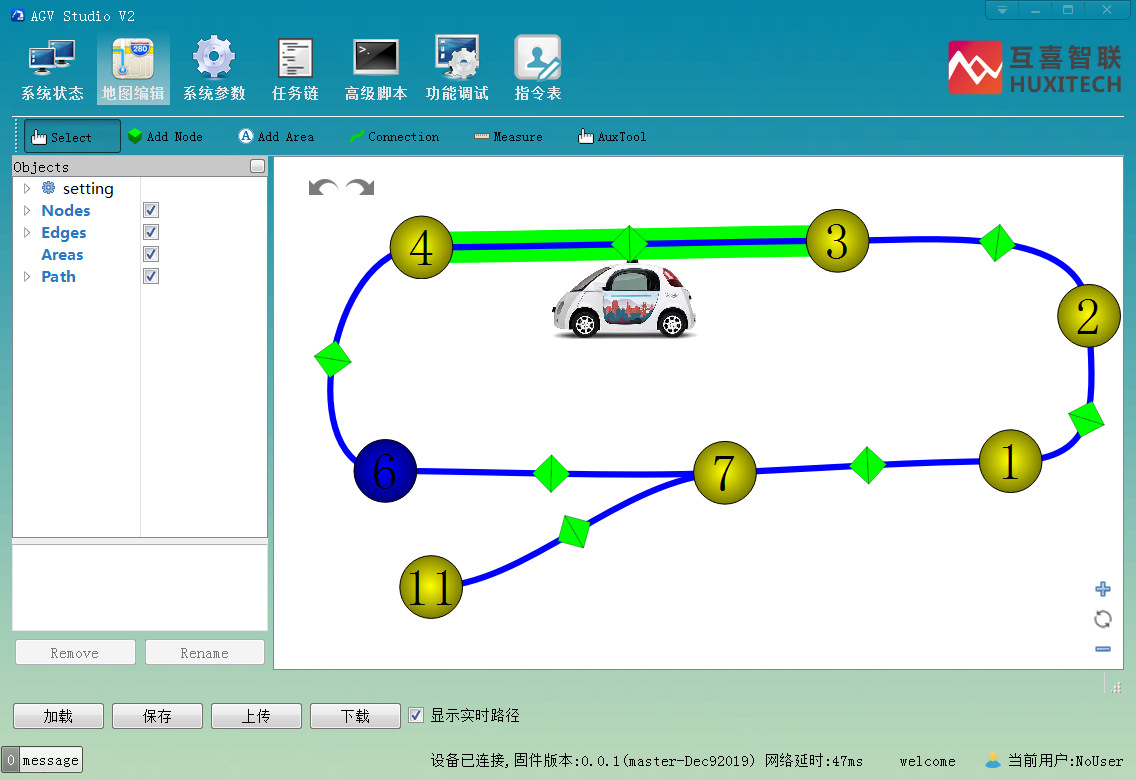
内置地图 -控制器可以自由绘制地图和定义地标号,根据此地图AGV可以规划出任务所需要的最短路径。使用者还可以自己定义任务所需要的固定路径,所有操作均为图形化操作。
自主导航 - AGV控制器可以自动路径规划,可以让AGV在任意时间从一个站点导航到任意其他站点,无需编程。即使路线地图非常复杂,AGV也可以快速路线规划导航。
编程开发 - AGV控制器内置脚本编程,可以让AGV有更多扩展应用,可以完成一些复杂或者特殊的应用,如搭载机械臂,复杂任务逻辑处理等。
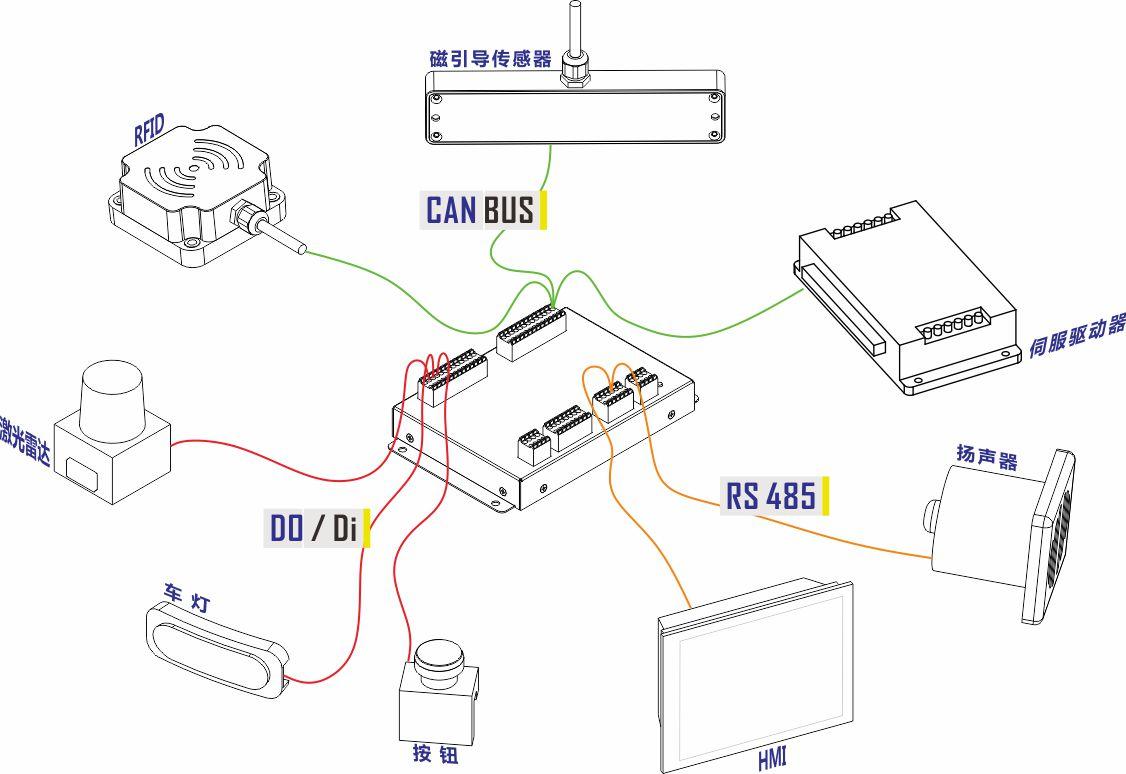
便捷拓扑连接
控制器集成了多种控制接口和较多数量的I/O接口,传感器和驱动器均通过CANBUS或其他标准接口连接。通过Mapping功能,可以使用DI/DO做更多定制化的功能。
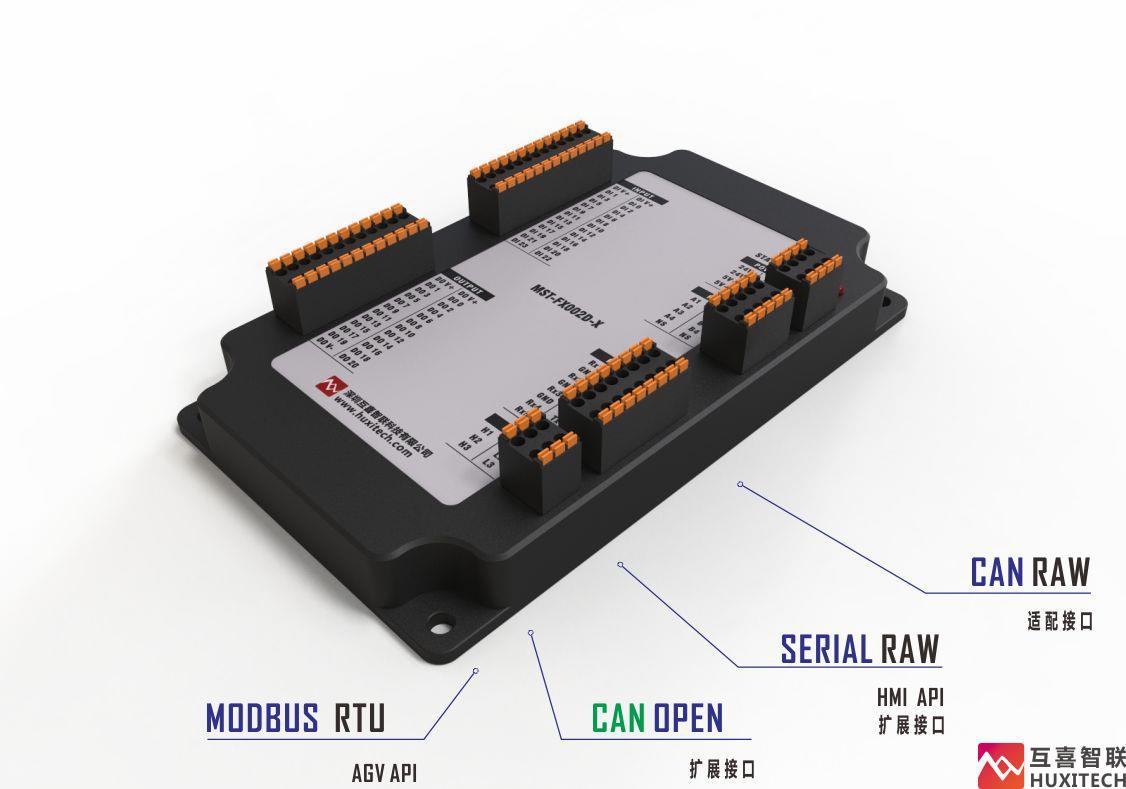
API &接口协议
通过ModBus RTU你可以做很多东西,你可以获取小车的所有状态,例如电量,当前任务,任务列表,函数状态,IO状态等等。同时,你可以通过Modbus RTU控制小车,去执行一个任务链,执行一个函数,或者命令小车去某一个位置。你还可以扩展更多的功能,例如和一个6轴的机械臂进行通讯并完成协同工作。
强大的操作实施软件


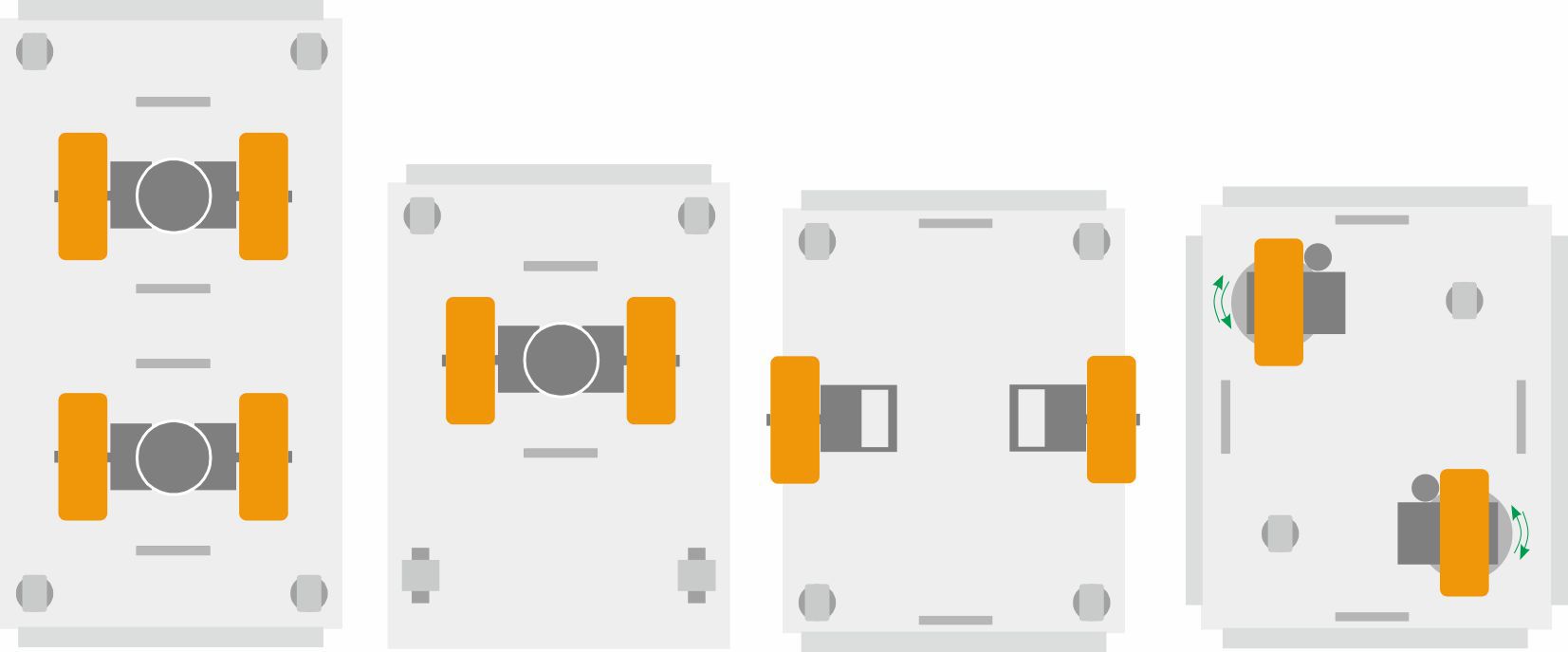
适配车型
该控制器支持多种AGV车型控制算法,可以应用在各种AGV车型结构上,如上图所示的双向潜伏式,单向潜伏式,固定差速,单/双舵轮AGV小车。
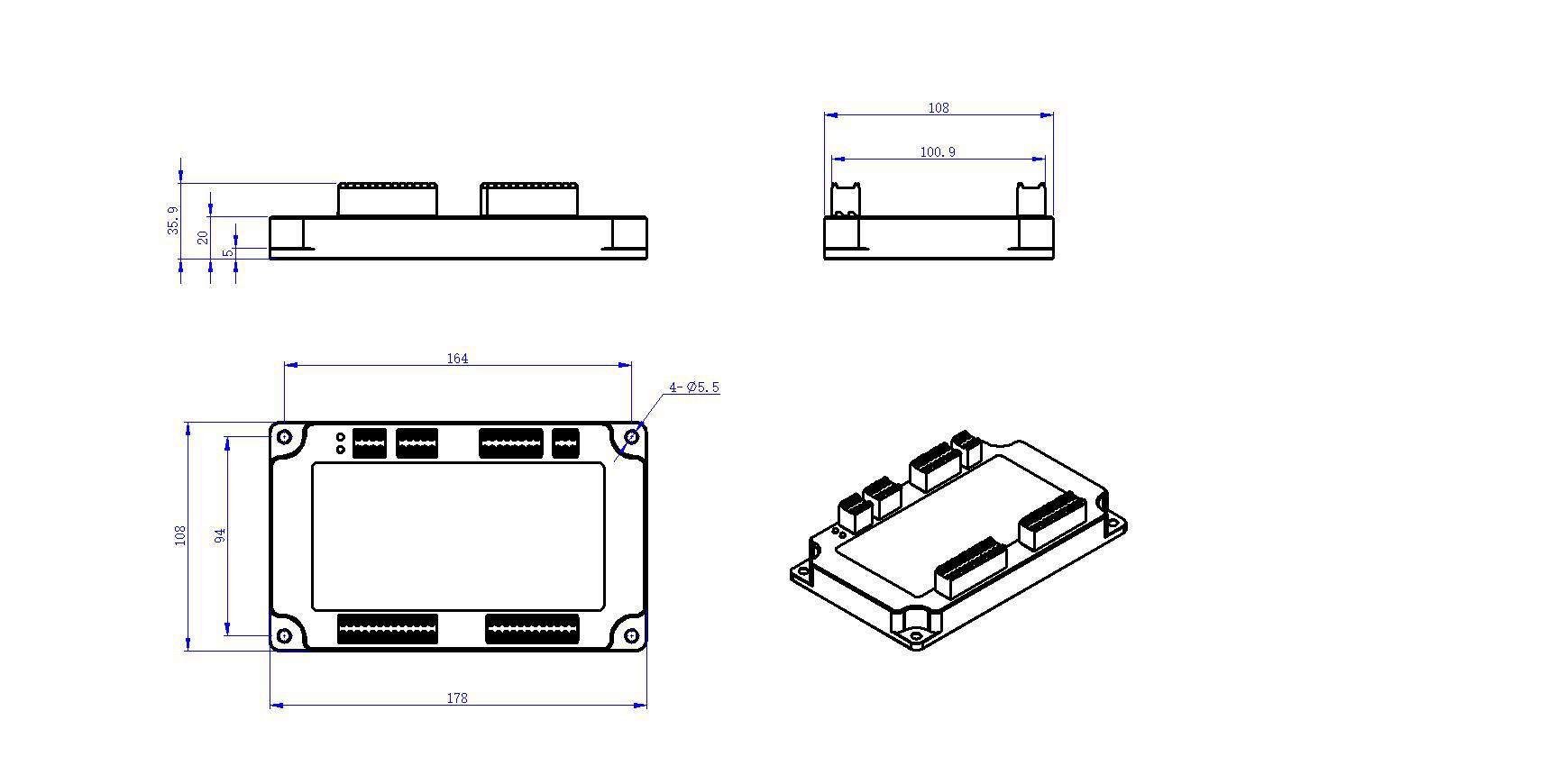
控制器尺寸

半导体芯片制造工艺流程
2024.02.22
碳化硅外延层缺陷简介
2024.01.17
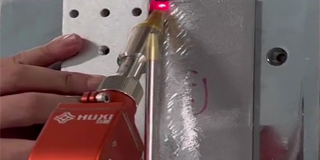
手持式激光焊接机能焊多厚的不锈钢?
目前市场上大部分的工艺都需要不锈钢材,但是钢材的叠加、拼接都需要焊接技术,所以不锈钢激光焊接机焊接不锈钢板成为了市场大多数人的选择
2022.10.20

如何减少焊接变形的解决方案大全
互喜激光手持焊接工具、平台激光焊接机、机器人焊接工作台、新能源焊接设备-----速度快,效率高值得您拥有!
2022.09.15

手持激光焊接工具适用的金属材质介绍
手持激光焊接工具适用的金属材质有碳钢、不锈钢、合金铝、铝及铝合金、铜及铜合金
2022.07.12

激光手持焊接工具安全使用注意事项您知道多少?
为了确保安全的操作及优化本产品的使用性能,请严格遵守注意事项!
2022.06.27



深圳互喜智联科技有限公司 © 版权所有 粤ICP备2023085857号


